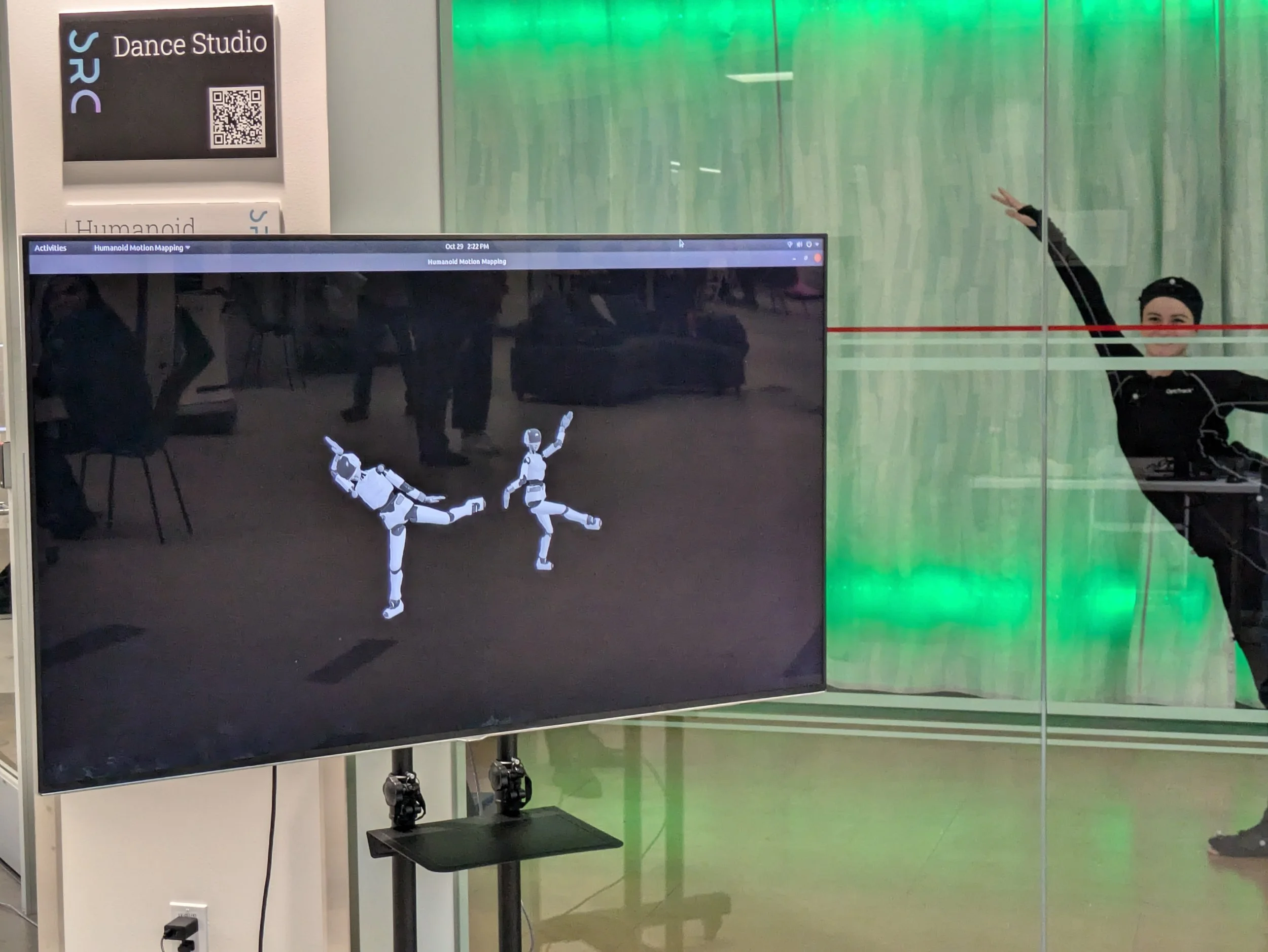
Humanoid Motion Mapping
with energy representation

Demo by: Catie Cuan, Rhea Malhotra, William Chong, with support from Matt VanCleave
Provided by the Stanford Robotics Lab (PI: Oussama Khatib) in collaboration with SRC.
Humanoid Motion Mapping
Map human dance motions unto a simulated robot and observe differences in power consumption and energy.
Learn more about the digital twins here