
Events

Rishabh Aggarwal
Swap the Tool, Not the Robot: The Case for Multi-Purpose Industrial Platforms
This seminar is open to Stanford faculty, students, staff, and sponsors.

Jussi Ängeslevä
Forming / Moving / Making – Meaning
This seminar is open to Stanford faculty, students, staff, and sponsors.

Oussama Khatib
Shaping the Future of Human-Robot Collaboration
This seminar is open to Stanford faculty, students, staff, and sponsors.


Allison Okamura
When Robots Care: Medical Robotics from Hospital to Home
This seminar is open to Stanford faculty, students, staff, and sponsors.
Nicholas Colonnese (Meta)
Dexterous Teleoperation: Challenges and Opportunities
The seminar is open to Stanford faculty, students, and sponsors.
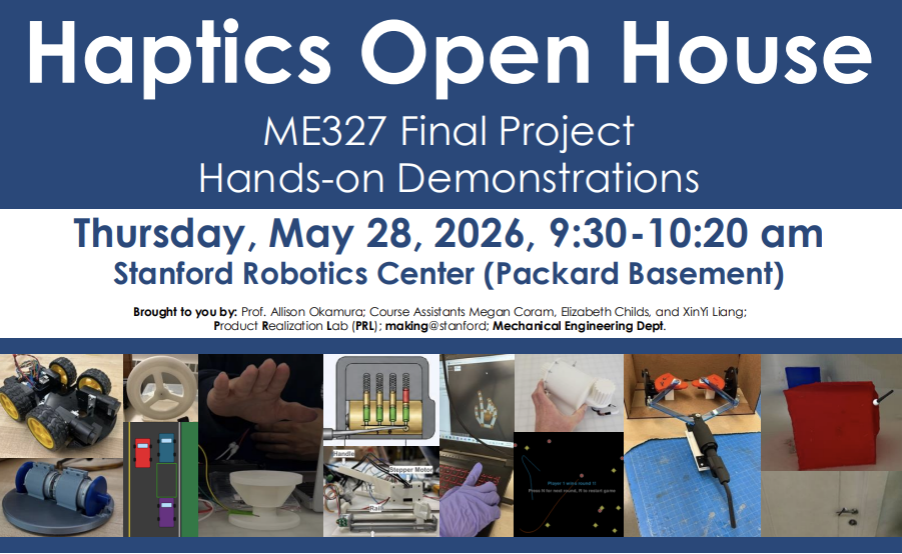
Haptics Open House
Haptics Open House
The event is open to Stanford faculty, staff, and students.

Prof. Rob Platt (Northeastern University)
Model Matters: Leveraging Geometry in Robot Learning
The seminar is open to Stanford faculty, students, and sponsors.
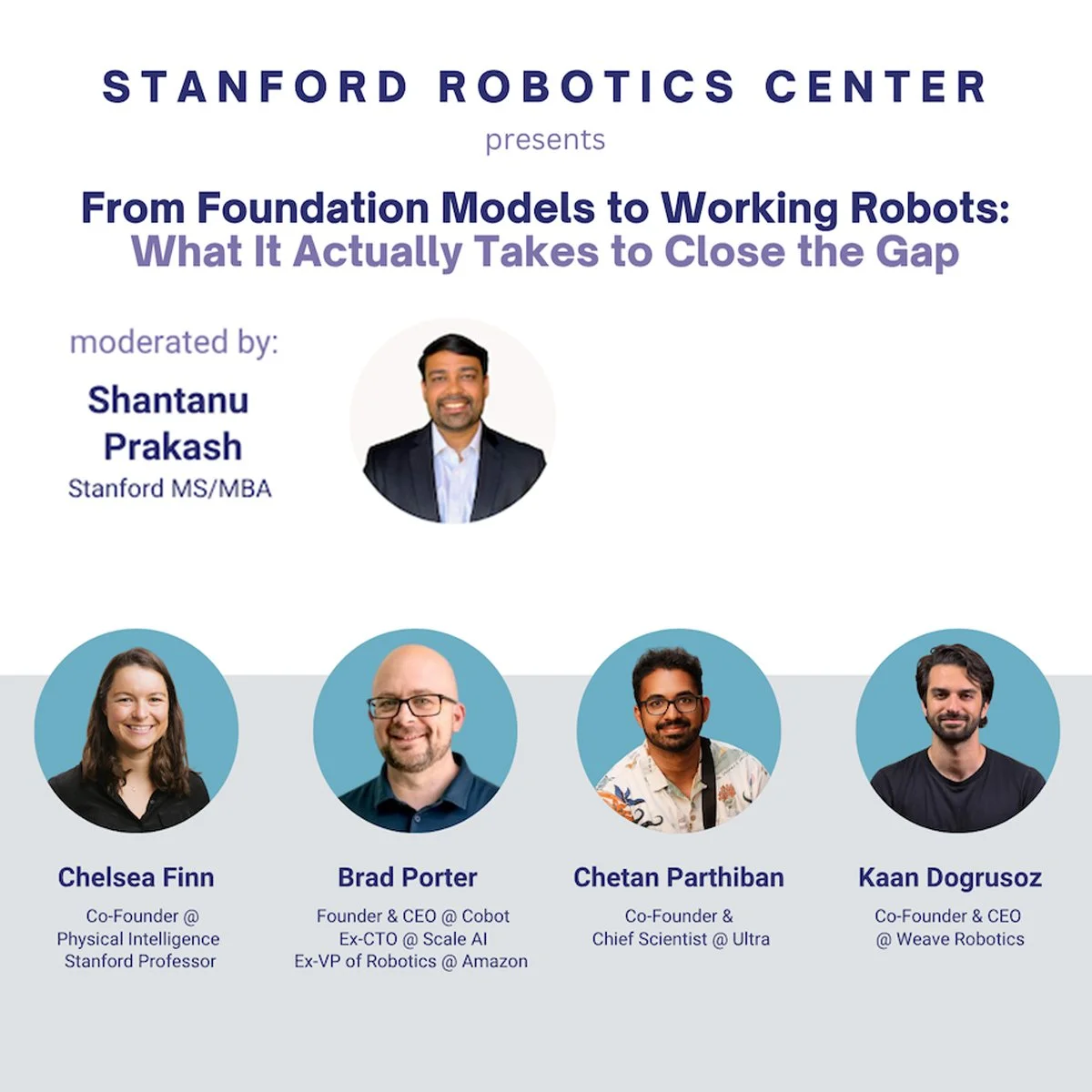
Chelsea Finn, Brad Porter, Chetan Parthiban, Kaan Dogrusoz, Shantanu Prakash (Moderator)
From Foundation Models to Working Robots: What It Actually Takes to Close the Gap
The seminar is open to Stanford faculty, students, and sponsors.

Student Speakers: Rohan Sinha & Changhao Wang
Towards Trustworthy Autonomy: Guardrails to detect, avoid, and learn from failures / Learning Dexerity from Humans
The seminar is open to Stanford faculty, students, and sponsors.

James Kuffner (Symbotic)
The Future of Intelligent Automated Logistics
The seminar is open to Stanford faculty and students.

Prof. Lillian Chin (University of Texas at Austin)
Material Matters: Sensors and Actuators for Contact-Rich Robotics
The seminar is open to Stanford faculty, students, and sponsors.
Jiayuan Mao (Amazon Frontier AI & Robotics | UPenn)
Integrated Learning and Planning with Neuro-Symbolic Concepts
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Jessica Burgner-Kahrs (University of Toronto)
Toward Autonomous Continuum Robots: Modeling, Estimation, and Interaction
The seminar is open to Stanford faculty, students, and sponsors.

Bram Vanderborght (Professor Brubotics, Vrije Universiteit Brussel & imec)
Self-Healing Materials for Sustainable Soft Robots
The seminar is open to Stanford faculty, students, and sponsors.

Negahr Mehr (UC Berkeley)
Interactive Autonomy: Learning and Control for Multi-agent Interactions
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Michael Yip (UCSD)
Unlocking Autonomous Medical Robotics: From Image Guided Systems to Humanoid Robot Platforms
The seminar is open to Stanford faculty, students, and sponsors.
Prof. Danfei Xu (Georgia Tech)
Robot Learning from Human Experience: Science and Scaling
The seminar is open to Stanford faculty, students, and sponsors.
Prof. Baxi Chong (Penn State)
Mechanical intelligence in locomotion: from information theory to multi-legged robots
The seminar is open to Stanford faculty, students, and sponsors.

Zackory Erickson (Carnegie Mellon University)
Robot Learning and Wearable Interfaces in Pursuit of Robotic Caregivers
The seminar is open to Stanford faculty, students, and sponsors.

Mike Dooley, Labrador Systems
Lessons Learned Putting Functional Robots into the Home - And the Implications for AI and Humanoids Going Forward
The seminar is open to Stanford faculty, students, and sponsors.

Brad Nelson, Professor of Robotics and Intelligent Systems, ETH Zürich
Clinically Ready Microrobots
The seminar is open to Stanford faculty, students, and sponsors.

Dr. Jennifer Barry (RAI)
Robot Motion Learning with Physics-Based PDE Priors
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Max Simchowitz (CMU)
Generative Control, Action Chunking, and Moravec’s Paradox
The seminar is open to Stanford faculty, students, and sponsors.
Prof. Yue Wang (USC)
𝚿0: An Open Foundation Model Towards Universal Humanoid Loco-Manipulation
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Tapomayukh "Tapo" Bhattacharjee (Cornell)
Robot Motion Learning with Physics-Based PDE Priors
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Koushil Sreenath (UC Berkeley)
Physical Intelligence for Physical Care: Towards Stakeholder-Informed Caregiving Robots in the Real World
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Madhur Behl (University of Virginia)
Bringing AI Up To Speed
The seminar is open to Stanford faculty, students, and sponsors.
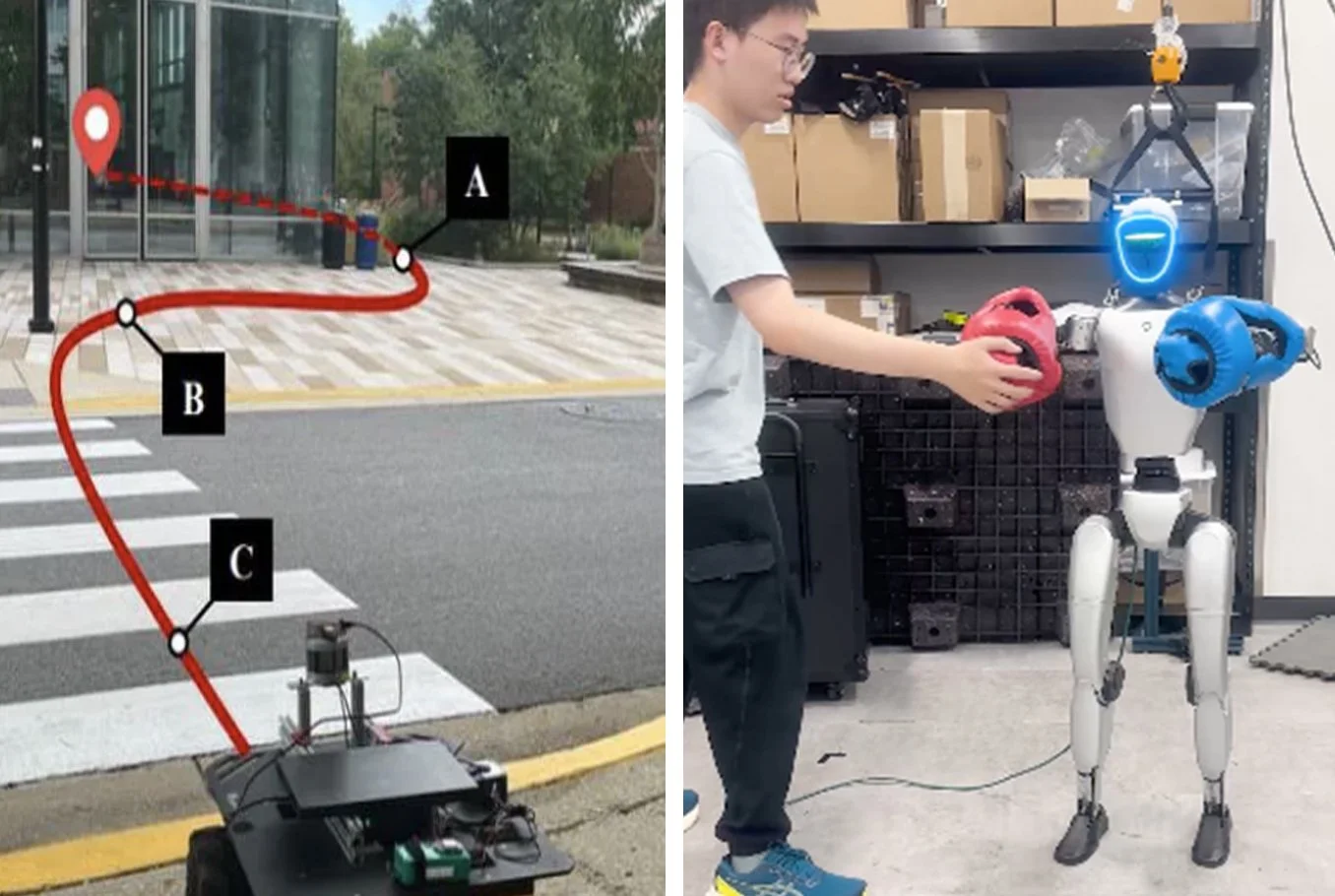
Jing Liang and Yao Feng
Autonomous Navigation in Complex Outdoor Environments: Towards Companion Robots for Longevity | From Digital Humans to Safe Humanoids: Grounded Reasoning and Compliant Interaction
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Sebastian Scherer (CMU)
Resilient Autonomy for Extreme and Uncertain Environments
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Ahmed. H. Qureshi (Purdue)
Robot Motion Learning with Physics-Based PDE Priors
The seminar is open to Stanford faculty, students, and sponsors.