
Events





















Robotics Seminar: Feifei Qian (USC)
Make Every Step an Experiment: Towards Terrain-aware, High-mobility Robots for Planetary Explorations
The seminar is open to Stanford faculty, students, and sponsors.

Cartography to shape morphing at many length scales
“Soft robots locomote by reshaping compliant bodies. However, precision control of large, reversible 3-D deformations with minimal hardware remains difficult. We tackle this by treating morphing as a geometric problem: prescribing an in-plane “metric actuation” field—coordinated local area expansions and contractions—changes a surface’s intrinsic curvature, causing a flat surface to autonomously adopt a prescribed 3-D form.”
The seminar is open to Stanford faculty, students, and sponsors.

“Robot Learning Without Action Chunking” & “Generalization through Task Representations with Foundation Models”
Student Speakers - Yuejiang Liu & Wenlong Huang, "Robot Learning Without Action Chunking” & “Generalization through Task Representations with Foundation Models”
The seminar is open to Stanford students, staff, and affiliates.

Robotics Entrepreneurship: Robotics from Sim to Scale: Challenges in Data & Go-to-Market
Panel discussion on how robotics ventures bridge the gap from simulation prototypes to scalable production and tackle the Go-to-market challenges.

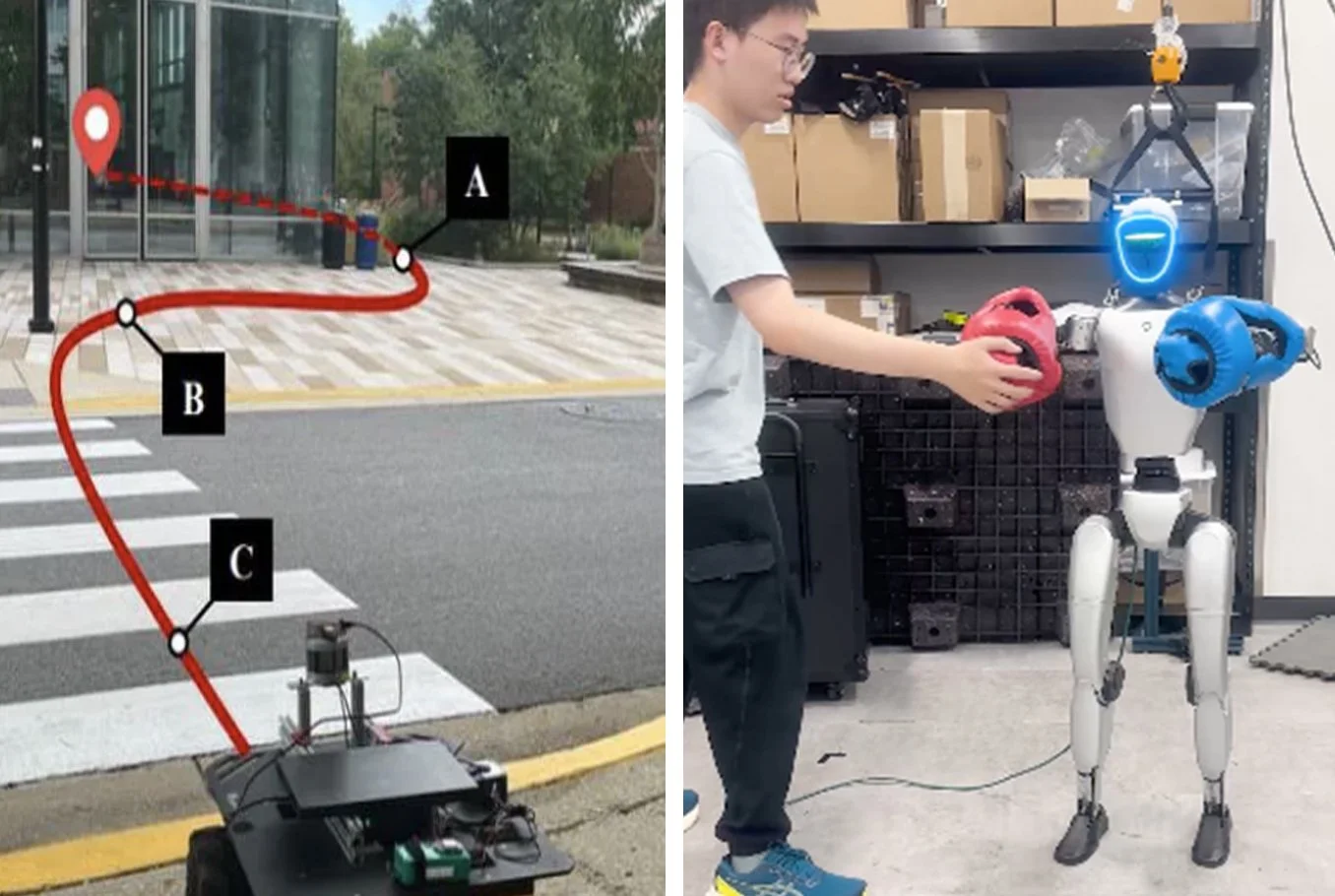
What Brains Forgot, Bodies Remember: Building Intelligence from the Ground Up
“Intelligence does not emerge fully formed, but it forms from a developmental cycle.” In this talk, Prof. Boyuan Chen presents a developmental arc of embodied intelligence centered on three interdependent capacities: Sense, Adapt, and Connect.
The seminar is open to Stanford faculty, students, and sponsors.

Learning to Control Large Teams of Robots
Prof. Eduardo Montijano ( Universidad de Zaragoza) speaks about the topic of controlling large teams of robots is a crucial challenge in robotics, due to the need for solutions that balance efficiency, scalability, and robustness.

Hardware / controls co-design to overcome challenges for aerial robots
Mark Mueller of UC Berkeley presents a seminar entitlted “Hardware / controls co-design to overcome challenges for aerial robots.” This seminar is open to Stanford faculty, students, and sponsors.
A Careful Examination of Multitask Transfer in TRI’s Large Behavior Models for Dexterous Manipulation
Russ Tedrake of MIT gives a talk entitled “A Careful Examination of Multitask Transfer in TRI’s Large Behavior Models for Dexterous Manipulation”

Evaluating and Improving Steerability of Generalist Robot Policies
Dhruv Shah, senior research scientist at Google DeepMind and incoming assistant professor at Princeton University, gives a talk on generalist robot policies.

On human-machine interaction games
Sam Burden, associate professor at UW gives a talk on human-machine interaction games.
Humanoids: From The Warehouse To Your House
Prof. Jonathan Hurst, co-founder of Agility Robotics, gives a talk “Humanoids: From The Warehouse To Your House” and a robotics demo of Digit. Registration required.
Towards Open World Robot Safety
Prof. Andrea Bajcsy, Assistant Professor in the Robotics Institute at Carnegie Mellon University, presents a seminar entitled “Towards Open World Robot Safety.”
Scalable Unified Perception for Autonomous Vehicles: Enhancing Efficiency and Cross-Platform Adaptability
Dr. Zhuwen LI is the Tech Lead Manager leading the detection, tracking and geometry teams at Nuro presents a seminar entitled “Scalable Unified Perception for Autonomous Vehicles: Enhancing Efficiency and Cross-Platform Adaptability”

Embodied Intelligence with Morphing Materials and Mechanisms
Lining Yao gives a seminar entitled “Embodied Intelligence with Morphing Materials and Mechanisms”

Spatial AI to Assist Humans and Enable Robots
We are thrilled to welcome Marc Pollefeys for an engaging talk on Spatial AI to Assist Humans and Enable Robots

Towards robots that generalize and adapt efficiently
Franziska Meier presents examples of FAIR robotics research towards the goal of learning general representations for a wide spectrum of robotics applications.

Making robots trustworthy: Understanding risk and uncertainty for safe autonomy
Seminar with Anushri Dixit, an Assistant Professor in Mechanical & Aerospace Engineering at the University of California, Los Angeles (UCLA) with research interests in safety-critical planning & control, robotics, and stochastic optimization.

Affordable Robots for Rehabilitation after Brain Injury Worldwide: Current Efforts and Barriers
Join us for an insightful seminar by Dr. Michelle J. Johnson, Associate Professor of Physical Medicine and Rehabilitation at the Perelman School of Medicine, University of Pennsylvania. A leading expert in rehabilitation robotics, Dr. Johnson will present her talk, "Affordable Robots for Rehabilitation after Brain Injury Worldwide: Current Efforts and Barriers."

Learning controllers for machines: Paradigms and recent results
Join us for an engaging seminar by Professor Sebastian Trimpe on leveraging learning for control in robotics and physical machines, where he will explore deep reinforcement learning, imitation learning, and Bayesian optimization to enhance control strategies.


ReachBot: Locomotion and Manipulation with Exceptional Reach
Join us for a seminar with Mark R. Cutkosky, Fletcher Jones Professor of Mechanical Engineering at Stanford University. He will discuss ReachBot, a robotic system developed with NASA for mobility in challenging environments like Martian caves. ReachBot uses extendable booms for long-reach movement and secure grasping, requiring a motion planning approach similar to multi-fingered grasping. Mark will outline its design, recent field tests in the Mojave Desert, and potential future applications, including integration with mobile platforms like ANYmal.

Creating Life-like Robots: From Musculoskeletal Designs to Biohybrid Innovations
Join us for an exciting seminar with Robert Katzschmann, Assistant Professor of Robotics at ETH Zurich and founder of the Soft Robotics Lab. Discover how living robots, integrating biological cells and synthetic materials, are transforming the landscape of robotics with capabilities like growth, regeneration, and environmental adaptation. Robert will delve into recent breakthroughs in electrohydraulic musculoskeletal robotics, vision-controlled inkjet printing, and xolographic biofabrication.

2025 Robotics Industry Outlook Webinar
Join us for an engaging exploration of the robotics industry and what lies ahead in 2025. This webinar will dive into the latest market trends, cutting-edge technologies, and emerging applications that are shaping the future of robotics. We’ll also examine the state of various industries, offer predictions for the future, and uncover potential disruptions on the horizon.
Whether you're a developer, business leader, or robotics enthusiast, this session will provide valuable insights to help you stay ahead in this dynamic field.

Space Autonomy Through the Lens of Foundation Models
Join speaker Daniele Gammelli as they explore how advancements in foundation models are shaping the future of space autonomy. The talk will cover adapting foundation model techniques, like Transformers, for reliable decision-making in spacecraft trajectory optimization. Additionally, Daniele will highlight opportunities for pre-trained models in machine learning-based autonomy stacks, from data curation to modular reasoning, paving the way for a versatile Space Foundation Model.

Active Compliance for Robust Manipulation
Join speaker Yifan Hou as they explore compliance in robotic manipulation—how the elastic relationship between force and motion enhances robustness. Yifan will present two methods: one using analytical modeling to compute optimal control and motion plans, and another introducing Adaptive Compliance Policy (ACP), a framework that learns dynamic compliance adjustments from human demonstrations.

Stanford Robotics Center Introductions
Join us for an engaging and insightful seminar with Steve Cousins, the Executive Director of the Stanford Robotics Center, as he introduces the groundbreaking work being done at one of the world’s leading hubs for robotics innovation. In this talk, Steve will provide an overview of the Center’s mission and provide insight into the future of robotics.

Where are the Field Robots?
Join us for an insightful seminar with Girish Chowdhary, an associate professor, Donald Biggar Willet Faculty Fellow, and director of the Field Robotics Engineering and Science Hub at the University of Illinois at Urbana-Champaign.Girish will explore how advances in AI, visual navigation, and soft robotics are transforming sustainability and agriculture by addressing challenges like long-duration autonomy in dynamic environments. He will also share his work on commercializing these technologies, with applications in phenotyping, pest monitoring, cover cropping, and solar farm maintenance.

Modeling Humans for Humanoid Robots
Join us for an engaging talk by Xiaolong Wang, assistant professor in the Electrical and Computer Engineering Department at UC San Diego and a member of the Robotics team in the TILOS NSF AI Institute. Xiaolong will delve into the challenges and breakthroughs in enabling humanoid robots to perform diverse tasks akin to human capabilities. He will introduce a 2-level learning framework that combines Vision-Language-Action models trained on human video data with advanced low-level robot manipulation and control skills. This innovative approach promises scalable solutions for general-purpose humanoid robots, capable of navigating and interacting across dynamic environments with human-like precision.

(Re)Working AI: Designing workplace technologies with and for labor
Join us for an insightful talk by Sarah Fox, Assistant Professor at Carnegie Mellon University and director of the Tech Solidarity Lab. Sarah will explore the transformative impacts of AI and automation on essential work sectors, highlighting the need for "worker-centered design." Drawing on ethnographic and design research, she will share cases from waste management, public transportation, and hospitality, demonstrating how participatory approaches can empower workers to shape the technologies influencing their livelihoods. From robotics to algorithmic management, Sarah's work seeks to bridge the gap between technological development and frontline needs, fostering cooperation, autonomy, and meaningful employment.

The Rise of the Robot Waiter: Extending the Job Characteristics Model in the Age of Automation
Join us for an engaging presentation by Dr. Lionel Robert, Professor of Information and Robotics at the University of Michigan, whose pioneering research explores the interplay between emerging technologies and workplace dynamics. Dr. Robert will discuss his recent work on the impact of service robots in industries like hospitality and dining, focusing on how these technologies reshape job design and employee experiences. Using the Job Characteristics Model (JCM) as a lens, his research reveals new dimensions of work, such as altered skill variety and task identity, and examines their effects on job satisfaction and performance. With insights drawn from extensive mixed-method studies, Dr. Robert provides a framework to understand and navigate the evolving roles of AI and robotics in the modern workplace.