
Remote Ultrasound with Haptic Feedback
Overview
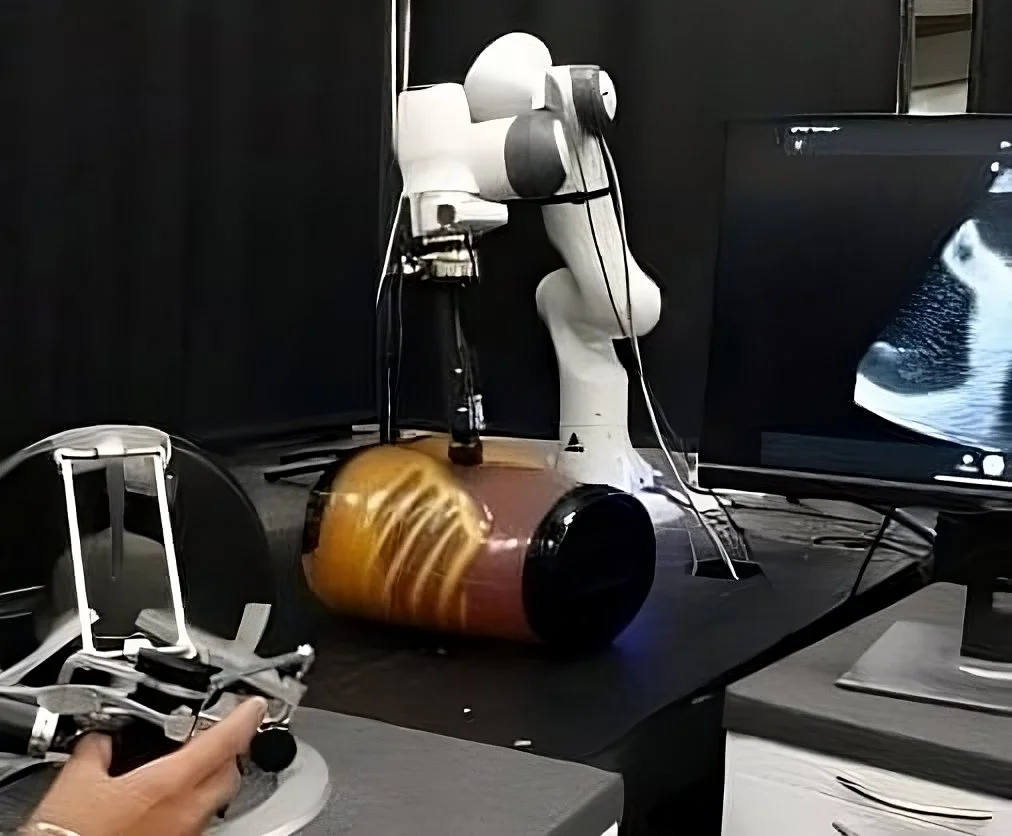
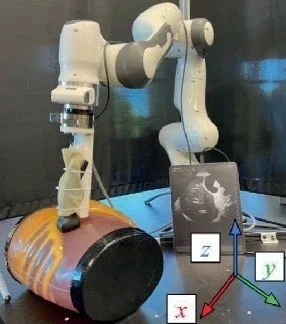
The Remote Ultrasound is a robotic platform developed to enhance the accessibility and efficiency of diagnostic imaging. Ultrasound is celebrated for its safety, portability, and cost-effectiveness, yet its reliance on highly trained technologists has limited its deployment in rural and underserved areas. By integrating a robotic manipulator to house and maneuver the transducer, this system overcomes staffing challenges and the ergonomic issues associated with manual probe handling.
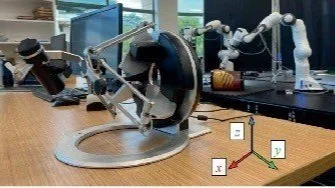
The platform operates in two distinct modes. In the autonomous survey mode, the robotic arm follows predetermined trajectories based on anatomical landmarks to perform a comprehensive exam. Should an anomaly be detected, the system transitions to a detailed scan mode, enabling a skilled ultrasound physician to remotely control the probe’s position, angle, and applied force via a haptic-feedback interface. This dual-mode functionality not only streamlines workflow but also achieves diagnostic performance on par with traditional manual scanning.
By addressing the global shortage of ultrasound technologists and the risk of repetitive motion injuries, this system could solve a critical problem in medical imaging. With the goal of high-quality, efficient, and remote diagnostic examinations, this project could broaden access to essential healthcare services in underserved and rural communities. Ultimately, as a research initiative serves to enhance patient care by ensuring timely and expert evaluations, leading to improved health outcomes.
Extra Reading
Recent Media
Credits
Oussama Khatib and the Stanford Robotics Lab
Adrian Piedra