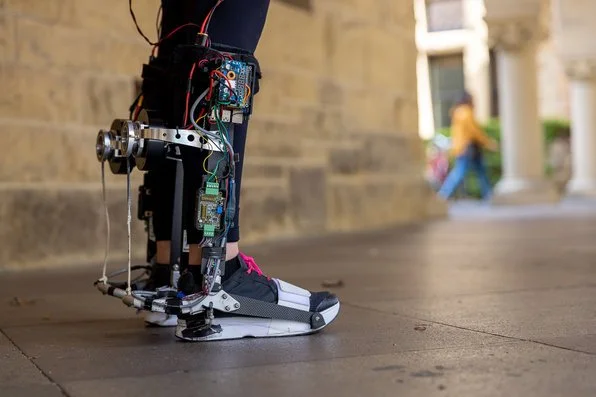
Super-ankle
Demo by: Jiaen Wu, Jack Ren
Provided by the Stanford Biomechatronics Laboratory (PI: Steve Collins) in collaboration with SRC.
Enhancing Mobility with Exoskeleton Technology
This demonstration showcases an untethered exoskeleton designed to make walking easier, faster, and more efficient. Fitted like a boot, the exoskeleton uses a motor that works with calf muscles, providing an extra push to propel the foot forward with each step. Unlike traditional exoskeletons, this device adapts to each user's unique walking style in real-time, delivering personalized assistance that reduces the energy required to walk while boosting walking speed.