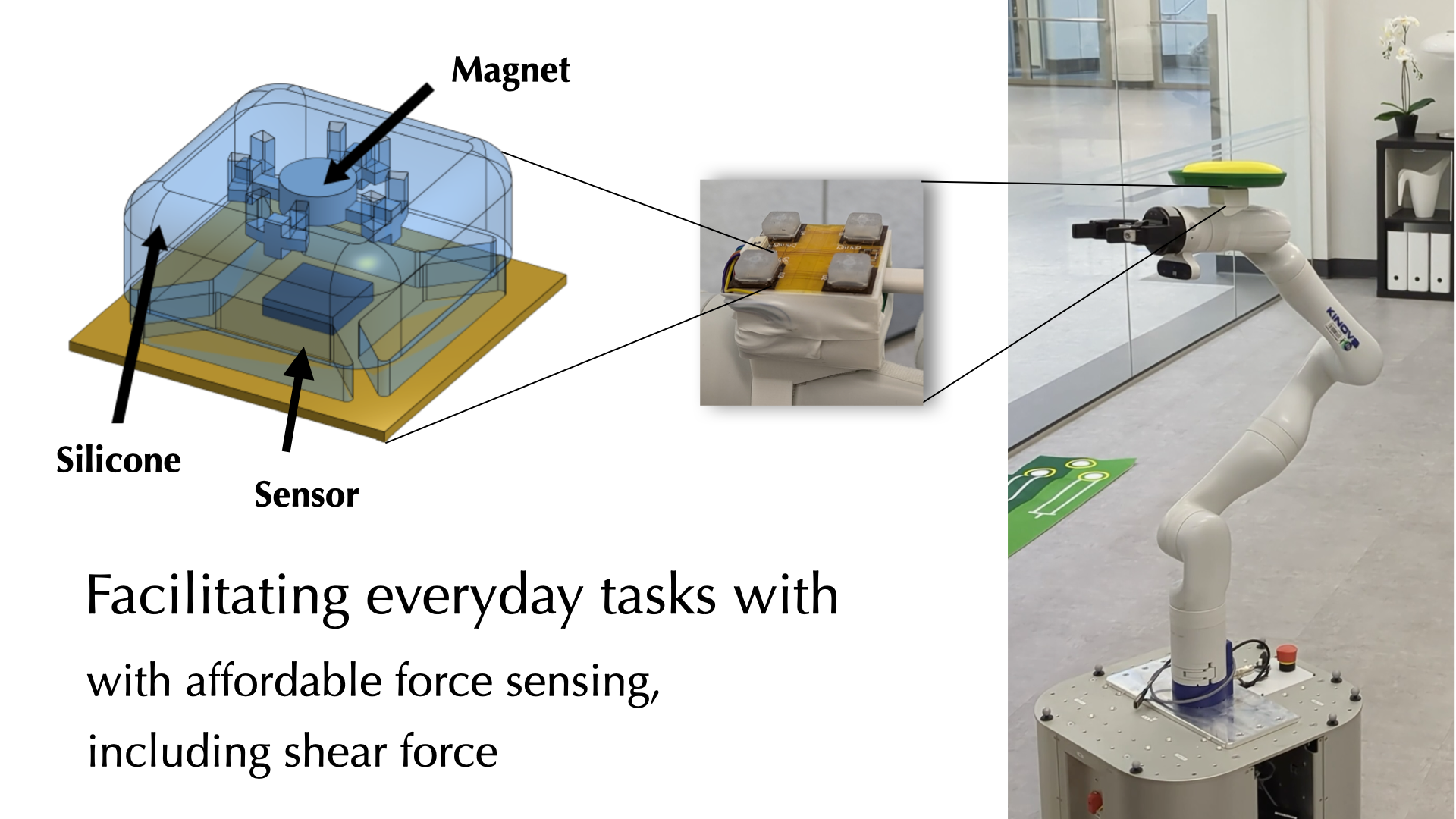
Tactile Sensor Balancing
Provided by the Stanford Robotics Lab (PI: Oussama Khatib), the Biomimetics and Dexterous Manipulation Lab (PI: Mark Cutkosky), and the Interactive Perception and Robot Learning Lab (PI: Jeannette Bohg) in collaboration with SRC
Demo by: Seongheon Hong, Ryan Dwyer, Chinmay Devmalya, Hojung Choi, Rika Antonova
Tactile Sensor Balancing
A household robot assistant delivers food to a user while balancing the tray on its arm.