
Events





















Rule Breakers: Movie Special Screening
The Stanford Robotics Center and Graduate School of Business Women in Management cordially invite you to the screening of Rule Breakers, a dramatic feature film inspired by the true story of the Afghan all-girls robotics team who overcame tremendous obstacles to learn coding and robotics, and then traveled the world competing in international robotics competitions.

The Stanford Robotics Center Launch Symposium!
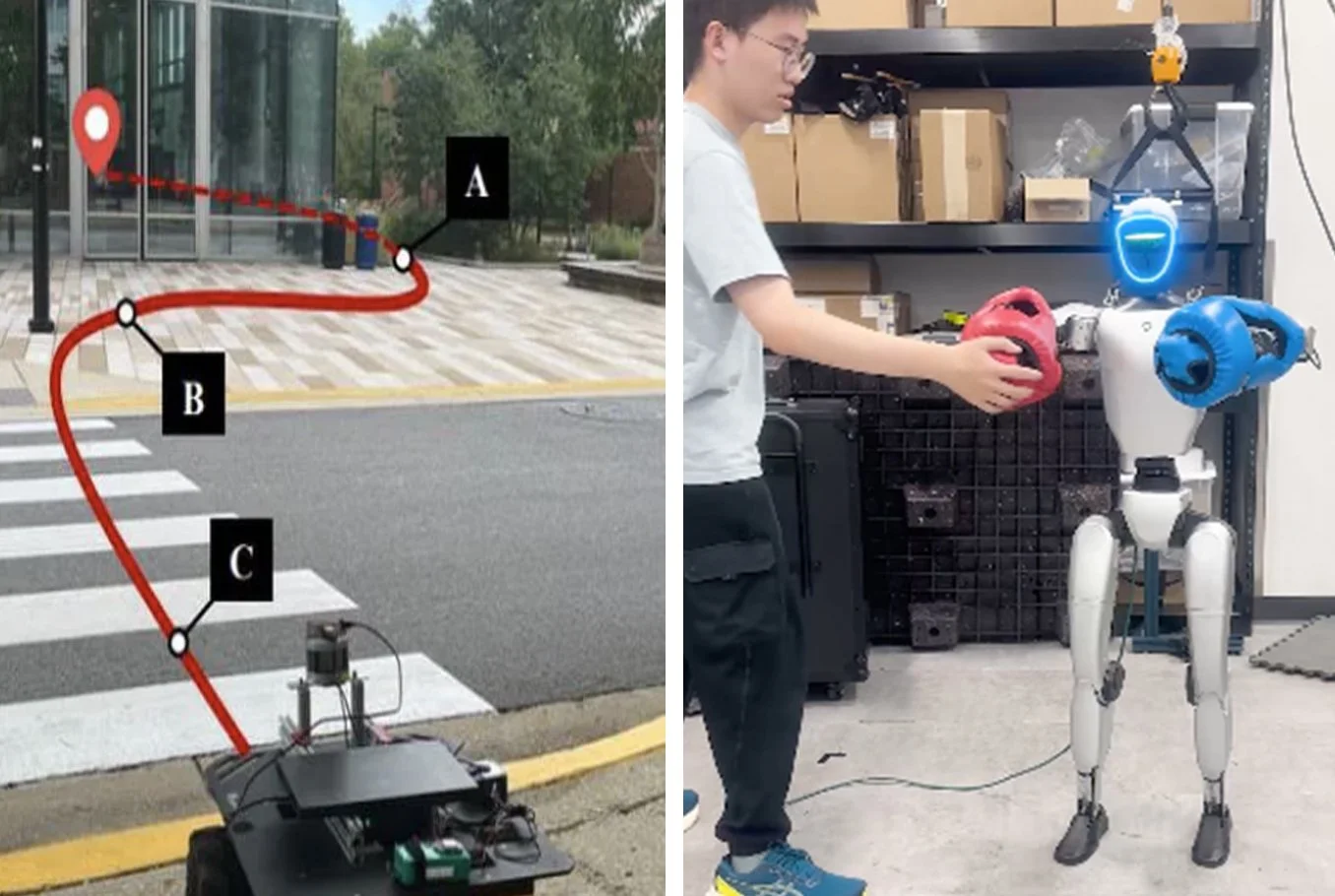
On November 2, 2024, the Stanford Robotics Center (SRC) hosted its Launch Symposium and Tour event, marking a milestone in Stanford Robotics history. The event featured talks from Stanford faculty and keynote speakers, guided tours of the brand new facilities, and live demonstrations of groundbreaking robotics projects. This exciting day offered attendees the chance to explore the future of robotics. You can still check out the agenda, watch symposium videos, and explore the demo hub to learn more about this remarkable day.